Loading...
Searching...
No Matches
Heed::polygon Class Reference
#include <polyline.h>
 Inheritance diagram for Heed::polygon:
Inheritance diagram for Heed::polygon: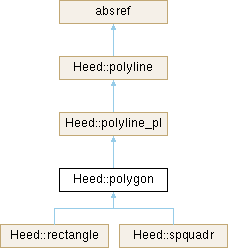
Public Member Functions | |
| int | check_point_in (const point &fpt, vfloat prec) const |
| point | cross (const straight &fsl, vfloat prec) const |
| int | range (const point &fpt, const vec &dir, vfloat &rng, point &fptenr, vfloat prec) const |
| polygon & | operator= (const polygon &fpl) |
| polygon (void) | |
| polygon (const polygon &plg) | |
| polygon (const polyline_pl &fpl, int fs_convex) | |
| polygon (const straight *fsl, int fqsl, vfloat prec) | |
| Public Member Functions inherited from Heed::polyline_pl | |
| plane | Gpn (void) const |
| polyline_pl (void) | |
| polyline_pl (const polyline_pl &pl) | |
| polyline_pl (const plane &fpn, const point *fpt, int fqpt) | |
| polyline_pl (polyline &pl) | |
| polyline_pl (const polyline &pl) | |
| polyline_pl & | operator= (const polyline_pl &fpl) |
| Public Member Functions inherited from Heed::polyline | |
| int | Gqpt (void) const |
| point | Gpt (int n) const |
| int | Gqsl (void) const |
| straight | Gsl (int n) const |
| int | check_point_in (const point &fpt, vfloat prec) const |
| int | cross (const straight &fsl, point *pc, int &qpc, polyline *pl, int &qpl, vfloat prec) const |
| vfloat | dist_two_inter (polyline &pl, vfloat prec) const |
| vfloat | distance (const point &fpt) const |
| vfloat | distance (const point &fpt, point &cpt) const |
| polyline (void) | |
| polyline (polyline &pl) | |
| polyline (const polyline &pl) | |
| polyline (const point *fpt, int fqpt) | |
| polyline (const point &fpt1, const point &fpt2) | |
| polyline & | operator= (const polyline &fpl) |
| ~polyline (void) | |
| Public Member Functions inherited from absref | |
| virtual | ~absref () |
| virtual void | down (const abssyscoor *fasc) |
| virtual void | up (const abssyscoor *fasc) |
| virtual void | turn (const vec &dir, vfloat angle) |
| virtual void | shift (const vec &dir) |
Public Attributes | |
| int | s_convex |
Additional Inherited Members | |
| Protected Member Functions inherited from Heed::polyline_pl | |
| virtual void | get_components (ActivePtr< absref_transmit > &aref_tran) |
| Protected Member Functions inherited from Heed::polyline | |
| virtual void | get_components (ActivePtr< absref_transmit > &aref_tran) |
| void | polyline_init (const point *fpt, int fqpt) |
| void | polyline_del (void) |
| Protected Attributes inherited from Heed::polyline_pl | |
| plane | pn |
| Protected Attributes inherited from Heed::polyline | |
| int | qpt |
| point * | pt |
| int | qsl |
| straight * | sl |
| absref ** | aref |
| Static Protected Attributes inherited from Heed::polyline_pl | |
| static absrefabsref::* | aref_pl = (absref absref::*)&polyline_pl::pn |
Detailed Description
Definition at line 154 of file polyline.h.
Constructor & Destructor Documentation
◆ polygon() [1/4]
|
inline |
Definition at line 169 of file polyline.h.
Referenced by polygon(), Heed::rectangle::rectangle(), and Heed::spquadr::spquadr().
◆ polygon() [2/4]
|
inline |
Definition at line 170 of file polyline.h.
◆ polygon() [3/4]
|
inline |
Definition at line 173 of file polyline.h.
175 if (fpl.Gqpt() < 4 ||
176 fpl.Gpt(0) !=
177 fpl.Gpt(qpt -
178 1)) { // 4 repeats 1, so different points are 3 or more
182 }
183 }
◆ polygon() [4/4]
Definition at line 285 of file polyline.cpp.
289 int n, m;
290 // now check that either the piv's of lines are not equal to each other,
291 // or the dir's are not parallel.
292 // It does not prove that input data are corrent, but more
293 // explicit prove might take too much time.
294 for (n = 0; n < fqsl - 1; n++)
295 for (m = n + 1; m < fqsl; m++) {
296 if (fsl[n].Gpiv() == fsl[m].Gpiv())
297 if (check_par(fsl[n].Gdir(), fsl[m].Gdir(), 0) !=
298 0) //1 par, -1 antipar
299 {
301 << "Parallel lines with the same pivot cannot form polygin\n";
302 for (int k = 0; k < fqsl; k++)
305 }
306 }
307 int qptl = fqsl + 1;
309 for (n = 1; n < fqsl; n++) {
310 ptl[n] = fsl[n - 1].cross(fsl[n], prec);
313 << " straight lines are not crossed properly\n"
314 << "fsl[n-1]=" << fsl[n - 1] << "fsl[n]=" << fsl[n]
317 }
318 }
319 ptl[0] = fsl[fqsl - 1].cross(fsl[0], prec);
322 << " straight lines are not crossed properly\n"
323 << "fsl[fqsl-1]=" << fsl[fqsl - 1] << "fsl[0]=" << fsl[0]
326 }
327 ptl[fqsl] = ptl[0];
328 plane pnl = plane(fsl[0].Gpiv(), fsl[0].Gdir() || fsl[1].Gdir());
329 polyline_pl pll(pnl, ptl, qptl);
331
332 delete ptl;
333
334}
Member Function Documentation
◆ check_point_in()
Definition at line 345 of file polyline.cpp.
345 {
347 int i;
349 return i;
350 }
352 return i;
353 }
354 /* The idea of the following algorithm is circulating around the polygon
355 and finding of two points, one gives the minimum angle relatively
356 some(any) direction, another gives the maximal angle.
357 The point resides inside polygon if they are the same at the end of
358 circulation.
359 */
360 point endpt[2];
362 endpt[1] = pt[0];
363 double totang = 0;
364 double ang, ang2;
365 //int s_start[2];
366 //s_start[0]=0;
367 //s_start[1]=0;
368 int n;
370 ang2 = 0.0;
372 if (ang <= M_PI) {
373 // go to opposite direction of clock
374 totang += ang;
375 } else {
376 ang2 = 2 * M_PI - ang;
377 totang -= ang2;
378 }
379 }
380
382 return 0;
383}
int check_point_in(const point &fp, vfloat prec) const
Definition: plane.cpp:70
int check_point_in(const point &fpt, vfloat prec) const
Definition: polyline.cpp:79
vfloat ang2projvec(const vec &r1, const vec &r2, const vec &normal)
Definition: vec.cpp:212
Referenced by cross().
◆ cross()
Definition at line 385 of file polyline.cpp.
385 {
388 //mcout<<"polygon::cross: cpt="<<cpt;
389 //mcout<<"vecerror="<<vecerror<<'\n';
392 if (s > 0)
393 return cpt;
394 else {
395 vecerror = 1;
396 return cpt;
397 }
398}
int check_point_in(const point &fpt, vfloat prec) const
Definition: polyline.cpp:345
◆ operator=()
Definition at line 336 of file polyline.cpp.
336 {
338 polyline_del();
339 polyline_init(fpl.pt, fpl.qpt);
340 pn = fpl.pn;
341 s_convex = fpl.s_convex;
342 return *this;
343}
void polyline_init(const point *fpt, int fqpt)
Definition: polyline.cpp:50
Referenced by Heed::rectangle::rectangle().
◆ range()
| int Heed::polygon::range | ( | const point & | fpt, |
| const vec & | dir, | ||
| vfloat & | rng, | ||
| point & | fptenr, | ||
| vfloat | prec | ||
| ) | const |
Definition at line 399 of file polyline.cpp.
400 {
402 " point &fptenr)");
403 straight stl(fpt, dir);
406 vecerror = 0;
407 return 0;
408 }
409 vec dif = pnt - fpt;
410 const int i = check_par(dif, dir, prec);
411 if (i == 1) {
412 rng = length(dif);
413 fptenr = pnt;
414 return 1;
415 } else
416 return 0;
417}
friend int plane::cross(const polyline &pll, point *crpt, int &qcrpt, polyline *crpll, int &qcrpll, vfloat prec) const
Member Data Documentation
◆ s_convex
| int Heed::polygon::s_convex |
Definition at line 157 of file polyline.h.
Referenced by Heed::operator<<(), operator=(), and polygon().
The documentation for this class was generated from the following files: