#include <Trajectory.h>
 Inheritance diagram for Trajectory:
Inheritance diagram for Trajectory: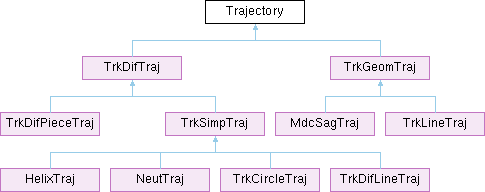
Public Member Functions | |
| Trajectory (double lowlim, double hilim) | |
| virtual | ~Trajectory () |
| virtual HepPoint3D | position (double) const =0 |
| virtual Hep3Vector | direction (double) const =0 |
| virtual Hep3Vector | delDirect (double) const =0 |
| virtual double | curvature (double) const =0 |
| virtual void | getInfo (double fltLen, HepPoint3D &pos, Hep3Vector &direction) const =0 |
| virtual void | getInfo (double fltLen, HepPoint3D &pos, Hep3Vector &direction, Hep3Vector &delDirect) const =0 |
| double | distTo0thError (double s, double tol, int pathDir) const |
| virtual double | distTo1stError (double s, double tol, int pathDir) const =0 |
| virtual double | distTo2ndError (double s, double tol, int pathDir) const =0 |
| virtual Trajectory * | clone () const =0 |
| bool | validFlightDistance (double f, double tolerance=0.0) const |
| virtual void | setFlightRange (double newrange[2]) |
| double | lowRange () const |
| double | hiRange () const |
| double | range () const |
| virtual void | print (std::ostream &os) const |
| virtual void | printAll (std::ostream &os) const |
Protected Member Functions | |
| Trajectory & | operator= (const Trajectory &) |
Protected Attributes | |
| double | flightrange [2] |
Detailed Description
Definition at line 35 of file Trajectory.h.
Constructor & Destructor Documentation
◆ Trajectory()
| Trajectory::Trajectory | ( | double | lowlim, |
| double | hilim | ||
| ) |
Definition at line 35 of file Trajectory.cxx.
◆ ~Trajectory()
|
virtual |
Definition at line 46 of file Trajectory.cxx.
Member Function Documentation
◆ clone()
|
pure virtual |
Implemented in MdcSagTraj, HelixTraj, NeutTraj, TrkDifPieceTraj, TrkLineTraj, TrkCircleTraj, TrkDifLineTraj, TrkGeomTraj, and TrkSimpTraj.
Referenced by TrkCompTrk::operator=(), and TrkCompTrk::TrkCompTrk().
◆ curvature()
|
pure virtual |
Implemented in MdcSagTraj, TrkDifPieceTraj, TrkLineTraj, HelixTraj, NeutTraj, TrkCircleTraj, and TrkDifLineTraj.
Referenced by TrkDifPieceTraj::curvature(), TrkMomCalculator::ptMom(), TrkPocaXY::TrkPocaXY(), and TrkMomCalculator::vecMom().
◆ delDirect()
|
pure virtual |
Implemented in MdcSagTraj, HelixTraj, NeutTraj, TrkDifPieceTraj, TrkLineTraj, TrkCircleTraj, and TrkDifLineTraj.
Referenced by TrkDifPieceTraj::delDirect(), and TrkPocaXY::TrkPocaXY().
◆ direction()
|
pure virtual |
Implemented in HelixTraj, NeutTraj, TrkCircleTraj, TrkDifLineTraj, MdcSagTraj, TrkDifPieceTraj, and TrkLineTraj.
Referenced by CgemHitOnTrack::dipAngle(), MdcHitOnTrack::dipAngle(), TrkCompTrk::direction(), TrkRep::direction(), TrkDifPieceTraj::direction(), TrkDifTraj::getDFInfo2(), TrkBmSpotOnTrk::GetRms(), TrkMomCalculator::ptMom(), TrkPocaXY::TrkPocaXY(), and TrkMomCalculator::vecMom().
◆ distTo0thError()
| double Trajectory::distTo0thError | ( | double | s, |
| double | tol, | ||
| int | pathDir | ||
| ) | const |
Definition at line 51 of file Trajectory.cxx.
◆ distTo1stError()
|
pure virtual |
Implemented in TrkCircleTraj, TrkDifLineTraj, MdcSagTraj, HelixTraj, NeutTraj, TrkDifPieceTraj, and TrkLineTraj.
Referenced by TrkDifPieceTraj::distTo1stError(), and TrkPocaBase::minimize().
◆ distTo2ndError()
|
pure virtual |
Implemented in TrkCircleTraj, TrkDifLineTraj, MdcSagTraj, HelixTraj, NeutTraj, TrkDifPieceTraj, and TrkLineTraj.
Referenced by TrkDifPieceTraj::distTo2ndError(), TrkPocaBase::stepToPointPoca(), and TrkPocaBase::stepTowardPoca().
◆ getInfo() [1/2]
|
pure virtual |
Implemented in MdcSagTraj, TrkDifPieceTraj, TrkLineTraj, HelixTraj, NeutTraj, TrkCircleTraj, and TrkDifLineTraj.
Referenced by CgemHitOnTrack::entranceAngle(), MdcHitOnTrack::entranceAngle(), CgemHitOnTrack::entranceAngleHit(), MdcHitOnTrack::entranceAngleHit(), MdcTrkRecon::fillTrackList(), TrkDifPieceTraj::getInfo(), HoughHit::residual(), TrkPocaBase::stepToPointPoca(), TrkPocaBase::stepTowardPoca(), MdcTrack::storeTrack(), HoughFinder::storeTracks(), CgemMdcFitAlg::updateTracks(), and MdcHitOnTrack::wireAmbig().
◆ getInfo() [2/2]
|
pure virtual |
Implemented in HelixTraj, NeutTraj, TrkCircleTraj, TrkDifLineTraj, MdcSagTraj, TrkDifPieceTraj, and TrkLineTraj.
◆ hiRange()
|
inline |
Definition at line 92 of file Trajectory.h.
Referenced by TrkDifPieceTraj::append(), TrkSimpTraj::changePoint(), MdcUtilitySvc::docaPatPar(), TrkCompTrk::endValidRange(), TrkRep::endValidRange(), TrkDifPieceTraj::invert(), TrkSimpTraj::invert(), TrkDifPieceTraj::locallyValid(), MdcHitOnTrack::MdcHitOnTrack(), TrkSimpTraj::operator==(), TrkDifPieceTraj::prepend(), TrkDifPieceTraj::print(), HelixTraj::printAll(), TrkDifPieceTraj::printAll(), range(), and TrkDifPieceTraj::TrkDifPieceTraj().
◆ lowRange()
|
inline |
Definition at line 91 of file Trajectory.h.
Referenced by TrkDifPieceTraj::append(), TrkSimpTraj::changePoint(), MdcUtilitySvc::docaPatPar(), TrkDifPieceTraj::invert(), TrkSimpTraj::invert(), TrkDifPieceTraj::locallyValid(), MdcHitOnTrack::MdcHitOnTrack(), TrkSimpTraj::operator==(), TrkDifPieceTraj::prepend(), HelixTraj::printAll(), TrkDifPieceTraj::printAll(), range(), TrkCompTrk::startValidRange(), TrkRep::startValidRange(), TrkDifPieceTraj::trajIndex(), and TrkDifPieceTraj::TrkDifPieceTraj().
◆ operator=()
|
protected |
Definition at line 86 of file Trajectory.cxx.
Referenced by HelixTraj::operator=(), TrkCircleTraj::operator=(), TrkDifLineTraj::operator=(), and TrkLineTraj::operator=().
◆ position()
|
pure virtual |
Implemented in HelixTraj, NeutTraj, TrkCircleTraj, TrkDifLineTraj, MdcSagTraj, TrkDifPieceTraj, and TrkLineTraj.
Referenced by TrkDifPieceTraj::append(), TrkPocaBase::minimize(), TrkCompTrk::position(), TrkRep::position(), TrkDifPieceTraj::position(), TrkDifPieceTraj::prepend(), TrkDifPieceTraj::printAll(), TrkPoca::TrkPoca(), and TrkPocaXY::TrkPocaXY().
◆ print()
|
virtual |
Reimplemented in HelixTraj, TrkDifPieceTraj, and TrkSimpTraj.
Definition at line 70 of file Trajectory.cxx.
Referenced by HelixTraj::print(), and TrkSimpTraj::print().
◆ printAll()
|
virtual |
Reimplemented in HelixTraj, TrkDifPieceTraj, and TrkSimpTraj.
Definition at line 78 of file Trajectory.cxx.
Referenced by TrkSimpTraj::printAll().
◆ range()
|
inline |
Definition at line 93 of file Trajectory.h.
Referenced by TrkDifPieceTraj::append(), TrkDifPieceTraj::invert(), TrkSimpTraj::invert(), and TrkDifPieceTraj::prepend().
◆ setFlightRange()
|
virtual |
Reimplemented in TrkDifPieceTraj.
Definition at line 57 of file Trajectory.cxx.
Referenced by TrkDifPieceTraj::append(), TrkSimpTraj::changePoint(), TrkDifPieceTraj::invert(), TrkSimpTraj::invert(), TrkDifPieceTraj::prepend(), and TrkDifPieceTraj::TrkDifPieceTraj().
◆ validFlightDistance()
|
inline |
Definition at line 88 of file Trajectory.h.
Referenced by TrkDifPieceTraj::trajIndex().
Member Data Documentation
◆ flightrange
|
protected |
Definition at line 83 of file Trajectory.h.
Referenced by TrkDifPieceTraj::append(), hiRange(), lowRange(), MdcSagTraj::operator=(), NeutTraj::operator=(), operator=(), TrkDifPieceTraj::operator=(), TrkDifPieceTraj::prepend(), print(), printAll(), TrkDifPieceTraj::resize(), setFlightRange(), TrkDifPieceTraj::setFlightRange(), Trajectory(), TrkDifPieceTraj::TrkDifPieceTraj(), and validFlightDistance().
The documentation for this class was generated from the following files: